



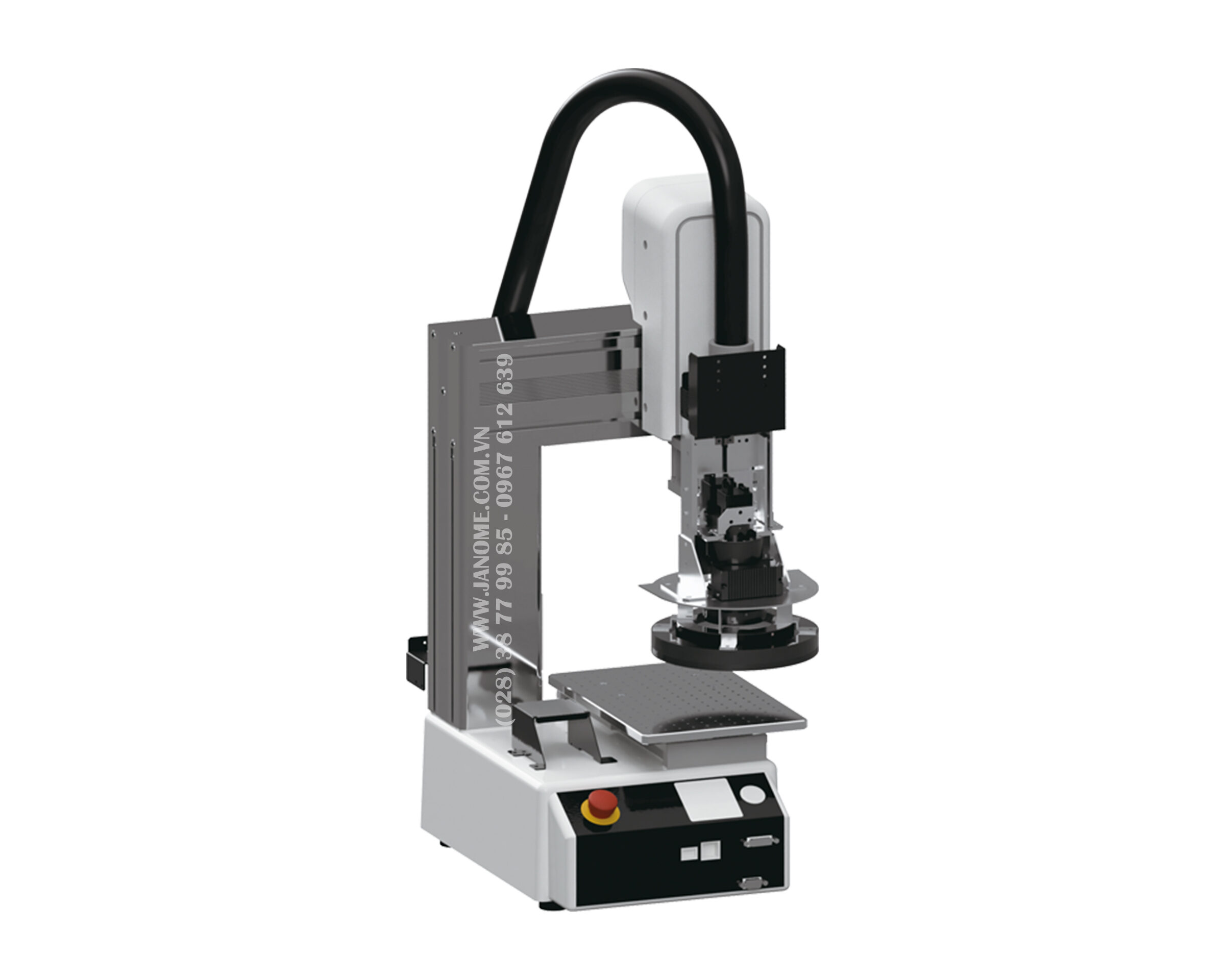
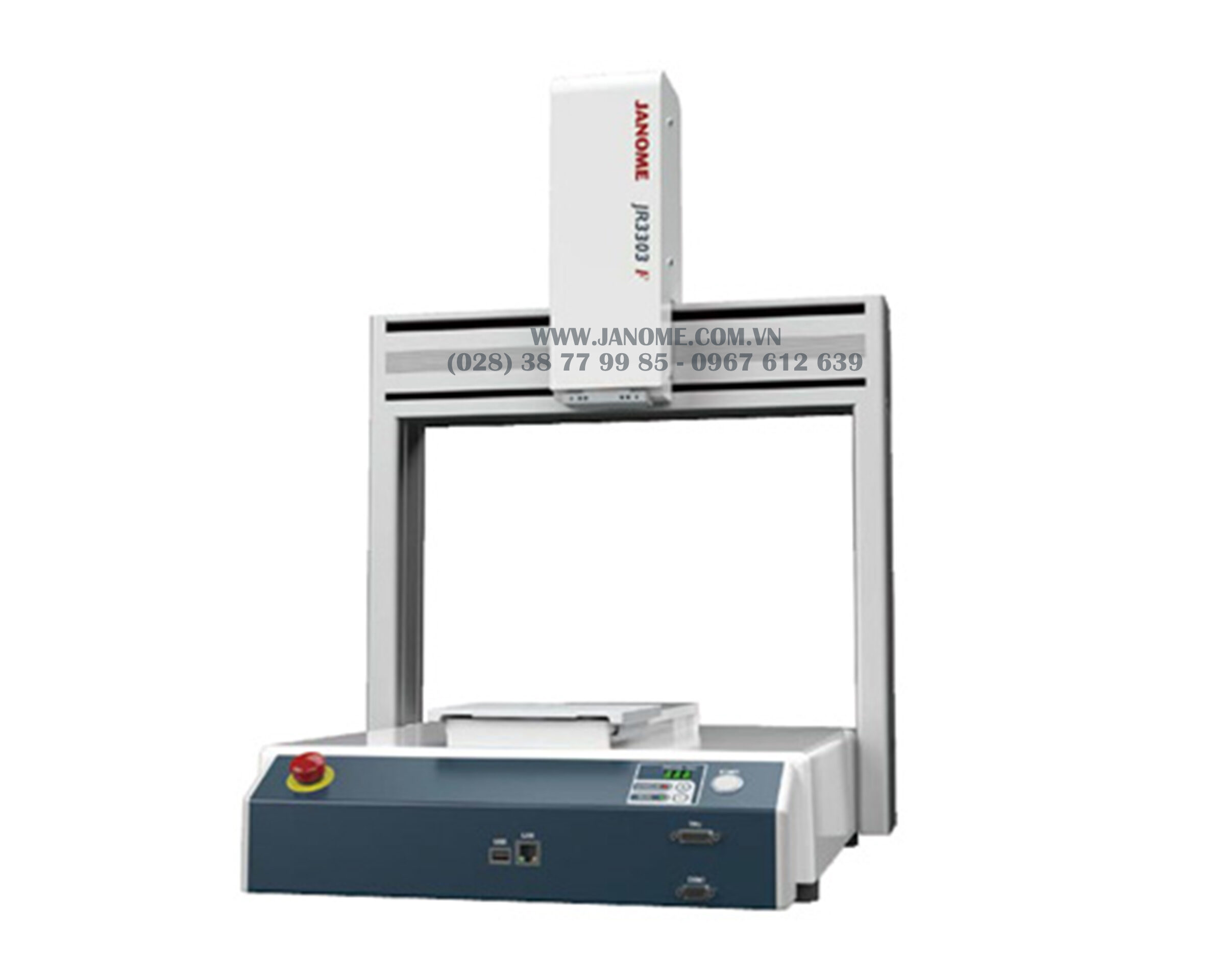
All-in-One
The multifunctional JC-3 Series Cartesian Robot comes complete with an easy-to-use dedicated controller and robot unit with a rich selection of stroke lengths for each axis.
Like our desktop robots, the JC-3 has convenient installation settings. Program teaching is easy; with the interactive method teaching pendant there is no need for complicated settings.
Ideal as an inline dispensing or screw tightening robot
Our specialized Screw Tightening Specification and Dispensing Specification software greatly shortens your program setting time. We also offer highly versatile Standard Specification software.
Uses just the right motors to meet your needs
The JC-3 Series uses feedback control stepping motors on the X and Y axes to carry a load up to 8kg, with a maximum acceleration of 5000mm/s2 and a top speed of 800mm/s.
Comprehensive Interfacing
An Ethernet port (LAN) and 3 COM ports (RS2323C) are included as standard equipment. Install an optional field network port (available types: CC-Link, DeviceNet, PROFIBUS, EtherNet/IP, PROFINET and CANopen).
Not only can you specify a program number and run it from the PLC, you can also specify position coordinates and move the robot axes, as well as rewrite the position coordinates in existing programs.
Highly compatible for vision system installation
Enhanced camera functions to match the needs of assembly facilities aiming for finer precision.
In addition to our helpful position correction function, we’ve added functions such as an automatic calibration function and a CCD camera adjustment function.
Control up to 2 external motors with the Auxiliary Axis Function (optional)
Teach and control up to 2 stepping motor or servomotor-driven “pulse string input type” external devices from the teaching pendant together with the robot axes. This function has many uses, such as adding a turntable to change the workpiece direction, or setting up and controlling a conveyor from the robot, etc.

Easy Program Teaching
Using our dedicated application software, teaching is easy for both “Screw Tightening Specifications” and “Dispensing Specifications”. Create teaching data based on DXF files or Gerber data using “JR C-Points II” PC software.
We offer an optional teaching pendant for teaching via JOG movement.
Teaching pendant features 11 different display languages
To help personnel from a wide variety of countries operate the robot, we have the following teaching pendant display languages built-in: English, Japanese, French, Spanish, Italian, German, Korean, Simplified Chinese, Traditional Chinese, Czech and Vietnamese.
No Homing Movement Needed(Absolute Encoder Model*1)
Using the encoder, the robot memorizes its current position. Homing movements between program runs are unnecessary.
*1 The Absolute Encoder Model is available for 3 axes types only.
System Software – User-friendly for both beginners and experienced operators, our original system software comes installed in the robot.
Our application-specific dedicated software makes robot teaching easy for even new users; we’ve filled out our command group even more to give you a wider variety of commands to use.
Automatic Camera Calibration
Good news for customers who want to use a vision system for position adjustments! Camera calibration, the once time-consuming process of matching the camera coordinates to robot coordinates is now a lot easier. Just register the camera-side calibration marks and the robot calibrates automatically.
Compatible Cameras*2
Panasonic A110・A210、PV200・PV260・PV300・PV500
Keyence CV3000・CV-X100・CV-X200・CV-X400、XG-8000・XG-X Series
OMRON FH Series・FQ Series
*2 Some camera models are discontinued. Please check with the manufacturer for details.
CCD Camera Adjustment Function with Counter
We’ve enhanced the functions for jobs done while using the camera to make position adjustments. The robot can acquire up to 3,000 position adjustments, so for workpieces lined up on a pallet, instead of repeating the process of capturing an image then doing the job one piece at a time, you can capture a batch of sequential images then do a batch of jobs sequentially and greatly shorten your total tact time.

Common Settings for All Programs
Settings such as “work home”, “move area limit”, “PTP movement conditions”, etc., which are the same for all programs can now be set in common. Making these settings once for all programs helps to shorten program teaching time. Of course, you can switch these settings over to set them individually if you wish.

4-axes Needle Adjuster Function
The robot records the dispenser nozzle tip position, so if a position discrepancy occurs when replacing the needle, the robot uses the “Needle Adjuster” function to determine the displacement amount and adjust the nozzle tip position allowing the dispenser to dispense in the same way it did before needle replacement. In addition to our 3-axis type, this function now also works for our 4-axis types. We strongly recommend this for customers when nozzle position adjustment after needle replacement is burdensome.

Error History
Error times and dates appear on the display.
The robot determines the time an error occurs, helping to identify the cause.
The error history saves data for the most recent 1,000 errors.

Simple PLC Function
The built-in simple sequencer allows the robot to easily coordinate with external devices on its own. (Maximum capacity 100 programs with 1,000 steps per program.)

Customizing Function
Create your own specialized software by registering the commands you often use in your point job data.

PC Software “JR C-PointsⅡ” (optional)
Our original interactive programming software, “JR C-Points II” lets you create, edit and save your teaching and customizing data on your PC.
Cut and paste point data in the manner of spreadsheet software, set points by numerical input, and create and edit point job commands without difficulty. Also with the “Point Graphic Editing Function”, create and edit path data as a graphic drawing for even more convenient program teaching.
Convert “JR C-Points” teaching data into “JR C-Points II” data and use.
①Programming Area
Directly input values to create and edit program data.
②Basic Operations Area
Use the helpful icons to easily create programs.
③Camera Image Display Area when using a USB camera*
The robot moves to center itself over the position you click on the camera display.(3 Axes models only)
④Robot Operations Area
Use the operation icons to make JOG movements.

USB Camera Teaching
Precise teaching is easy! Connect a USB camera* and set points using enlarged images on your PC screen, click the icons for the movements you want.
*For information about compatible USB cameras, please contact us.
Point Graphic Editing Function
- Based on imported background image data (jpg), DXF or Gerber data, draw points, straight lines, circles and arcs. With the automatic approach, precisely determine even difficult positions on your PC.
- Sorting by Specified Direction Function
When using programs with multiple paths, shorten the cycle time with a function that realigns the paths based upon the order of the starting points. - Automatic Arc Drawing Function
Circle editing is even easier with a function to set the R-axis by the angle of the radius.
Precise point setting using coordinate data

Precise point setting using DXF and Gerber data
Point setting using background image data referencing

Point setting by going along the lines of a background image
Sorting by Specified Direction Function

Sorting in order from the left
Automatic Arc Drawing Function

R Radius Designation
Software Applications
Dedicated software for screw tightening and dispensing jobs.
Screw Tightening Specifications
Creating screw tightening programs is easy: just set the job positions for screw tightening parameters such as screw pitch, length, and the driver rpm.

- Not just full screw tightening, but teaching screw loosening and partial (loose) screw tightening is also easy.
(Loosening operations require coordination from the screwdriver side.) - Screw Tightening Error Detection Function
Specialized screw tightening software features helpful functions including “Early Finish” detection for floating screw heads, and “No Finish Signal” detection for screws which spin in the hole without tightening down, as well as a function to stop the robot when the screw feeder is empty.
Dispensing Specifications
Creating dispensing programs is easy: just set the job positions for dispensing parameters such as point dispensing or line dispensing.
- Fill-in Dispensing Function
Convenient fill-in dispensing functions allow you to dispense like drawing a picture using only 2 points for a rectangle and 3 points for a circle.

- Purging Function
Have the robot purge on a repeating cycle when holding at the work home position. Also, purge the dispensing liquid whenever you want using the optional “Purge Switch”. - Fragmented Dispensing Prevention
Set waiting times to prevent fragmented dispensing at the beginning and spraying at the end of dispensing runs.
nguồn: www.janomeie.com








Đánh giá
Chưa có đánh giá nào.